来自菊园的智能驾驶新技术,将应用于下一代车型
通过摄像头、雷达等采集环境信息,不断提升环境感知的精准度,是当前智能驾驶技术的发力点。近日,位于嘉定菊园的中国科学院上海微系统与信息技术研究所在智能驾驶感知的两个关键问题——栅格占据预测和全景分割领域取得技术新突破,正式搭载后能够为车主提供更安全、更智能的驾驶体验。
近日,智能驾驶感知的两个关键问题——栅格占据预测(Occupancy Prediction)和全景分割(Panoptic Segmentation)取得技术新突破!位于嘉定菊园的中国科学院上海微系统与信息技术研究所两项新成果被机器人领域顶级国际学术会议2024 IEEE(ICRA)录用,并在路特斯下一代量产车型智能驾驶感知系统上完成测试验证,未来将正式搭载,为车主提供更安全、更智能的驾驶体验。
开车开得好好的,突然车头前行人横穿,完全来不及避让,造成交通事故,这就是老司机口中的“鬼探头”,汽车左右两侧产生视觉盲区,有人或者车辆被遮挡,当发现情况的时候为时已晚。随着高阶智能驾驶的发展,对车辆所处的道路、车道等环境信息的准确度要求进一步提升,视角重叠障碍物间的分辨是攻克难点。
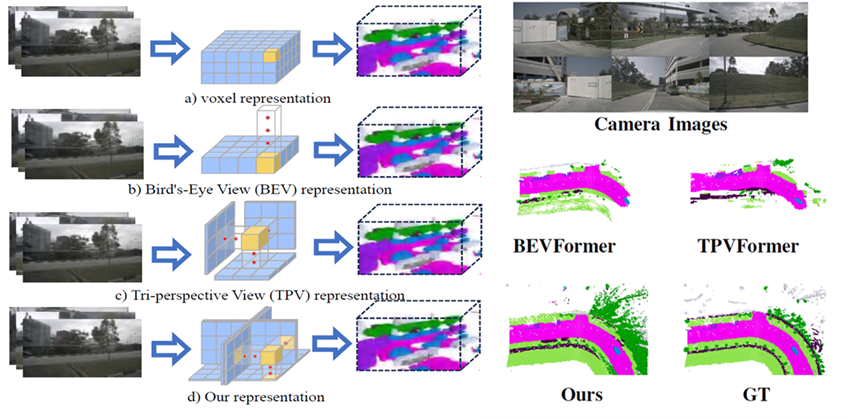
为解决上述问题,团队提出了全新的栅格占据预测方法——CVFormer,以车辆为中心进行环视,有效克服车体周身障碍物的视角遮挡问题,给司机一双具有“穿透力”的眼睛。此方法的性能指标提高了102.3%,并将计算复杂度大幅降低,在算力上更具优势。
开着开着,车辆莫名减速了,原来是智能驾驶系统把月亮当成了黄灯;经过寂静的墓园,结果导航屏幕上出现了很多人影……机械组成的“大脑”并不能灵活判断任何场景,在情况复杂道路上,这种缺点显得更加明显,这就是智能驾驶系统中,全景分割技术面临的挑战。
为解决这一问题,团队设计了全新模型BEE-Net,显著提升对环境识别的精度和性能,让机械“大脑”更聪明。本方法在驾驶场景分割权威数据集CityScapes验证,以65.0%的PQ精度超越现有模型。本模型已在路特斯下一代量产车型智能驾驶感知系统上完成了测试验证。
以上研究由中国科学院上海微系统与信息技术研究所仿生视觉系统实验室李嘉茂研究员团队负责,并得到科技部科技创新2030、中国科学院青促会、上海市优秀学术带头人等项目支持。